Après plusieurs années à concevoir des robots mini-sumo basés sur des microcontrôleurs, j’ai eu envie d’explorer un concept plus radical : créer un robot entièrement dépourvu de processeur, dont le comportement serait régi uniquement par des portes logiques. Ce projet, baptisé Neuron, a été une expérience très différente des précédentes constructions, presque un retour aux sources de l’électronique pure, où tout repose sur le câblage, la structure logique et le signal.
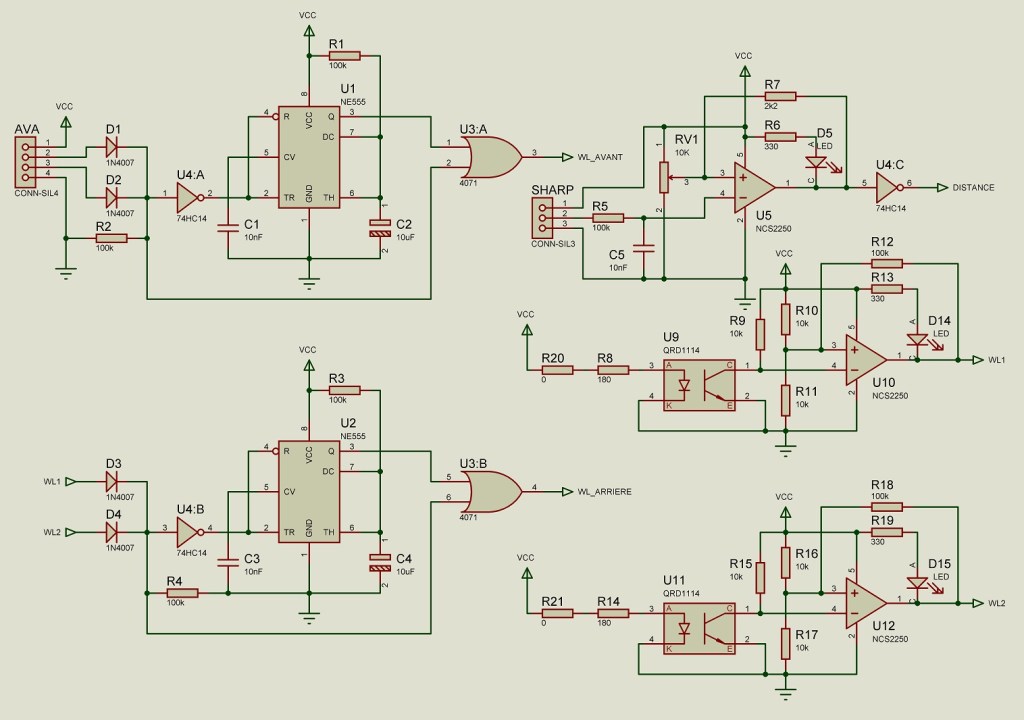
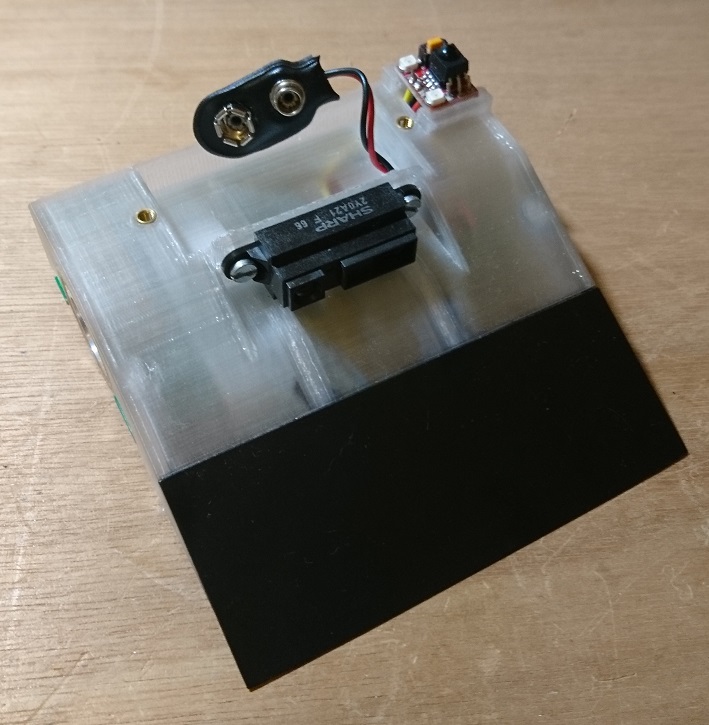
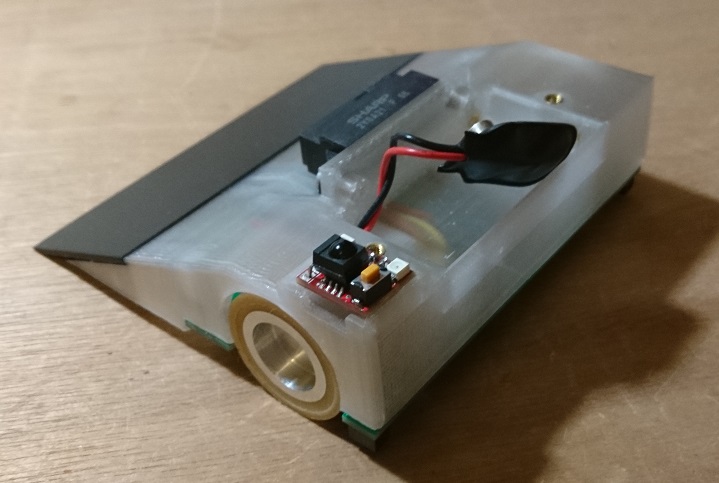
L’idée était simple : imaginer le robot le plus minimaliste possible, tout en conservant un comportement cohérent sur le dohyo. Pour cela, j’ai utilisé un seul capteur de distance Sharp. Lorsque le capteur ne détectait rien, le robot tournait sur lui-même à la recherche d’un adversaire. Dès qu’un obstacle apparaissait dans son champ, la logique gouvernant les moteurs basculait et le robot avançait droit devant.
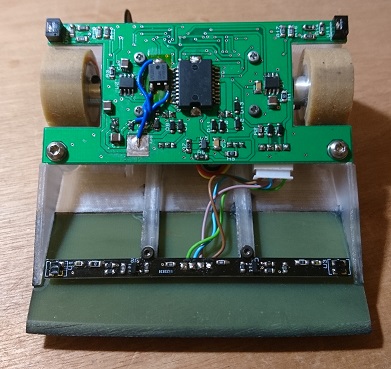
Cette logique, très dépouillée, reposait uniquement sur des portes ET, OU et inverseuses, quelques comparateurs, un NE555, ainsi que le L298, choisi autant pour sa capacité à piloter les moteurs que pour les parties logiques déjà intégrées au composant.
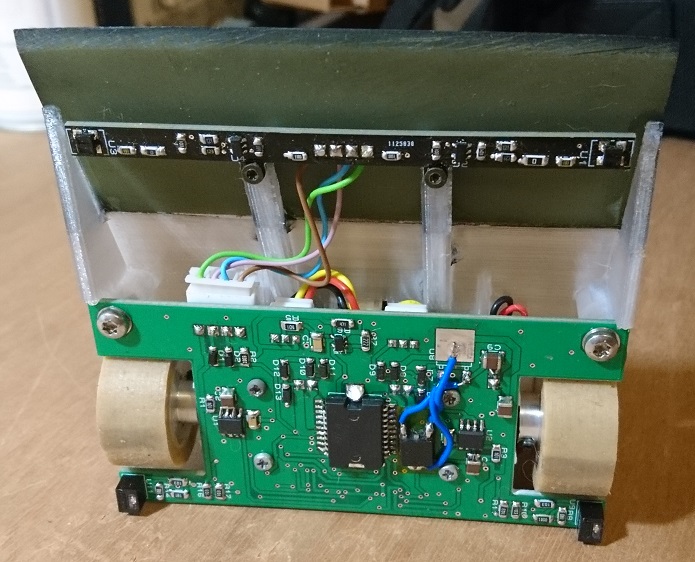
La structure logique était entièrement combinatoire : aucun cadencement, aucune horloge, tout se faisait en temps réel. J’ai tout de même intégré un système de priorité pour les capteurs de ligne blanche. Contrairement à mes robots précédents, où je différenciais avant gauche et avant droite, j’ai volontairement simplifié au maximum : ici, seules les notions d’avant et d’arrière comptaient.
Les capteurs passaient par un comparateur de niveau, puis déclenchaient un NE555 générant une impulsion fixe. L’idée était d’éviter un phénomène d’oscillation lorsque le robot était très proche du bord : au lieu de se mettre à hésiter en avançant et reculant rapidement, il conservait un comportement stable contrôlé par une temporisation.
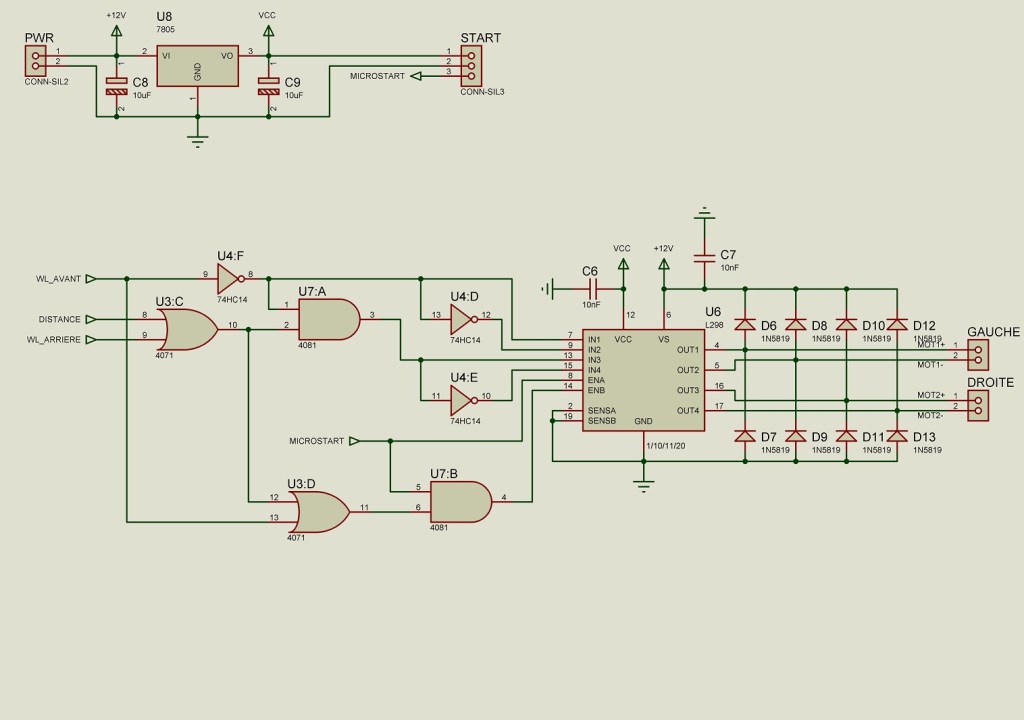
L’ensemble de l’électronique tenait sur un seul PCB, la première version embarquait seulement 2 portes ET, 4 OU et 6 inverseuses – très peu, finalement, pour définir tout le comportement du robot. Pour garantir le respect du délai réglementaire de départ, j’avais ajouté un petit module microstart permettant d’attendre les cinq secondes avant l’activation des moteurs.
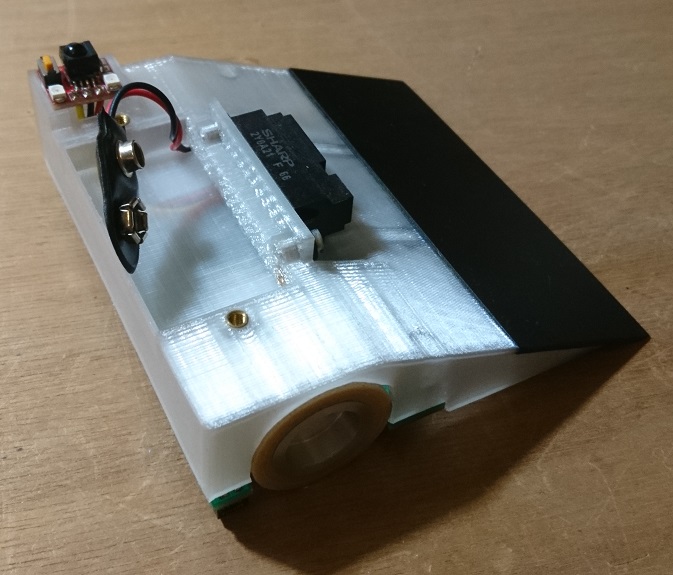
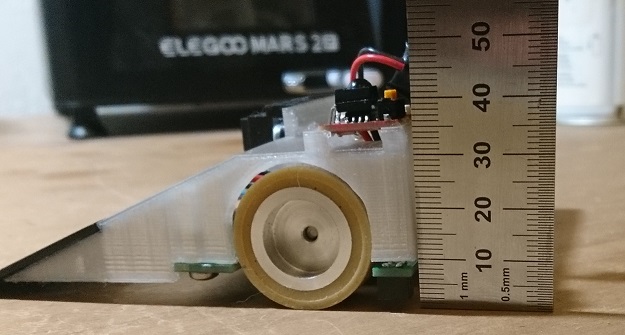
Côté mécanique, j’ai opté pour une forme rappelant celle d’un cale-porte, un triangle bas et incliné. Sa hauteur totale atteignait 45 mm. Comme sur mes robots précédents, j’ai repris le même duo moteurs/roues, ce qui donnait une vitesse encore modeste, mais suffisante pour valider l’idée. À l’avant, une lame longue en FR4 venait compléter la silhouette trapue du robot.
L’alimentation reposait sur une simple pile 9V. Un choix pratique, mais pas vraiment optimal : l’autonomie dépassait à peine quelques minutes, juste de quoi assurer quelques essais. Surtout, lors des appels de courant sur les moteurs, la tension chutait parfois brutalement, entraînant des comportements erratiques de la logique. C’est un des points faibles majeurs de cette architecture minimaliste.
Neuron n’a finalement pas participé à une compétition. Les essais ont montré un robot fonctionnel, cohérent, mais clairement limité en termes de performances. Son comportement restait trop basique, sa vitesse trop faible, et sa détection trop restreinte pour espérer tenir face à des adversaires modernes.
Mais ce n’était pas son objectif : Neuron était un projet pédagogique, expérimental, une manière d’explorer une autre facette de la robotique mini-sumo. Construire un robot 100 % logique m’a rappelé l’importance des bases, de la structure des signaux, des priorités et des interactions entre circuits. C’était un exercice stimulant, très différent de mes approches habituelles, et une étape qui restera marquante dans mon parcours de conception robotique.

Laisser un commentaire