En 2017, je bricolais déjà pas mal en électronique et en robotique, mais sans vraiment savoir où tout cela me menait. Un jour, un peu par hasard, je suis tombé sur un site qui présentait des compétitions de robots mini sumo. Je ne me souviens plus du nom du site, mais ce fut un vrai déclic.
En quelques minutes, j’ai compris que c’était exactement ce que je voulais faire : créer un robot autonome, capable de détecter, réagir et affronter un adversaire sur un ring. Le côté compétition m’a tout de suite plu, car il apporte une motivation concrète et pousse à être plus créatif et rigoureux dans chaque choix technique.
La conception de Raptor
Raptor a été mon tout premier robot mini sumo.
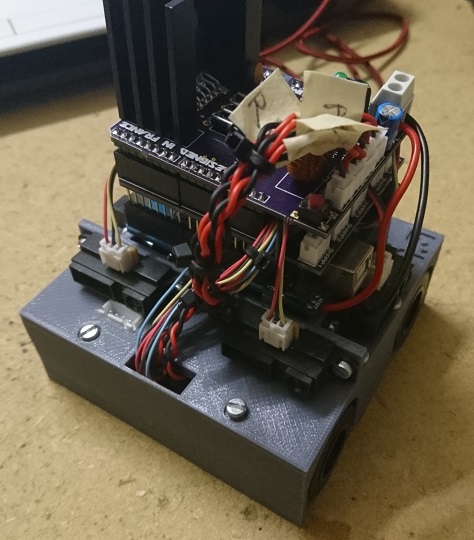
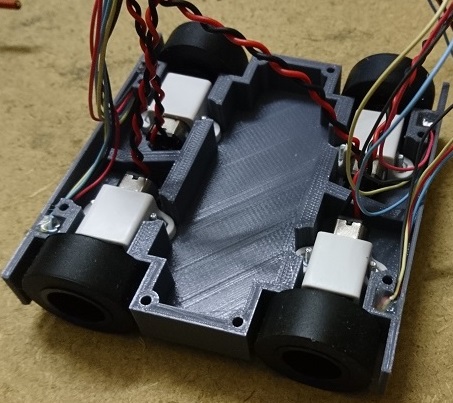
Je l’ai entièrement conçu et imprimé en 3D avec ma première imprimante, une Velleman Vertex. À cette époque, je découvrais encore la modélisation 3D, que je réalisais avec SketchUp — un outil pratique pour débuter, mais pas vraiment adapté à la conception mécanique précise. Cela s’est vite ressenti : le robot était très haut, pas du tout optimisé, et plutôt instable.
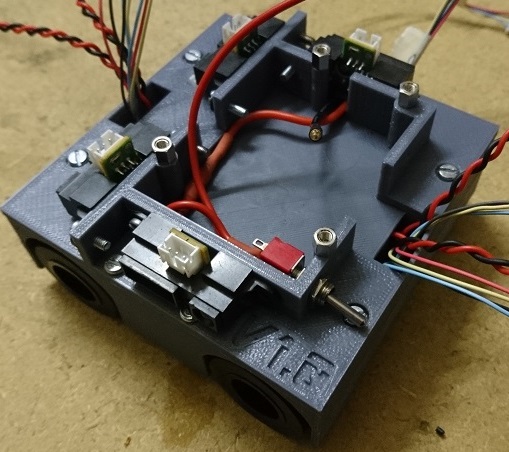
Le châssis, bien que robuste, manquait de rigidité. L’ensemble atteignait tout juste les 500 grammes réglementaires, mais la répartition du poids était loin d’être idéale. Avec ses quatre roues, il avait même tendance à être un peu bancal, l’une d’elles n’étant pas toujours bien en contact avec le sol.
Motricité et électronique embarquée
Pour la propulsion, j’avais choisi quatre moteurs Pololu 12 V avec un rapport de réduction de 298:1.
Autant dire que Raptor n’était pas un foudre de guerre : il avançait lentement, mais avec un certain couple. À ce moment-là, j’étais surtout concentré sur le fait de le faire fonctionner correctement, pas encore sur la vitesse ou la performance.
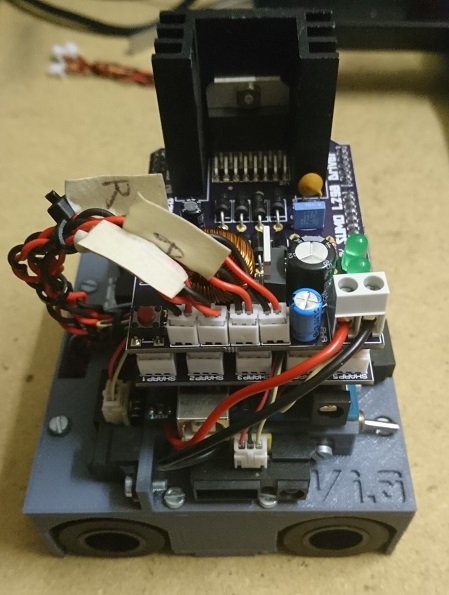
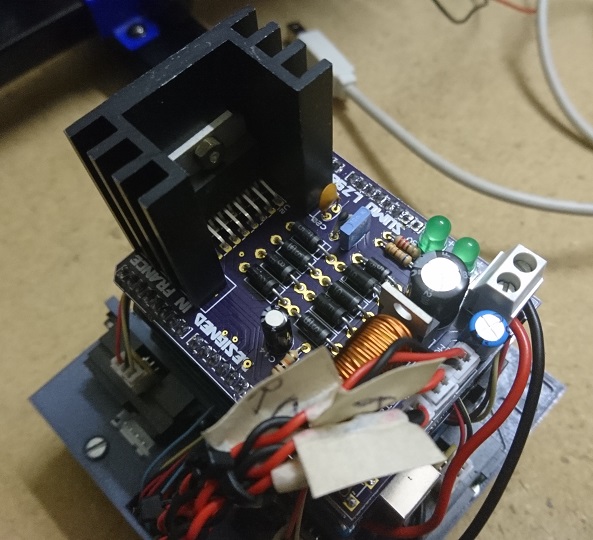
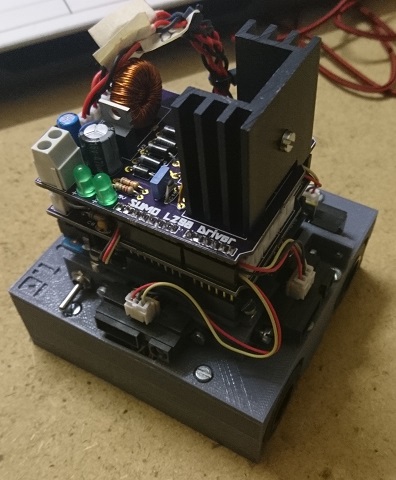
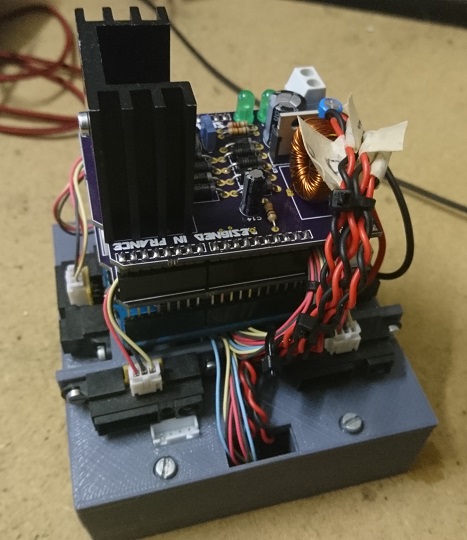
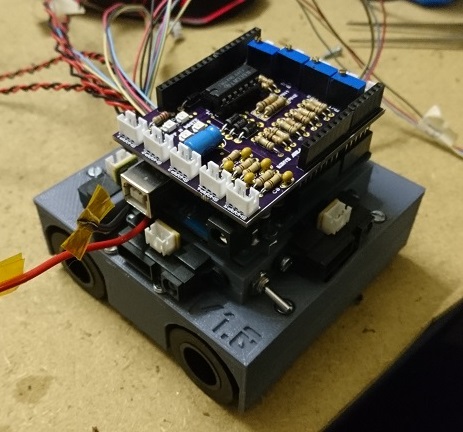
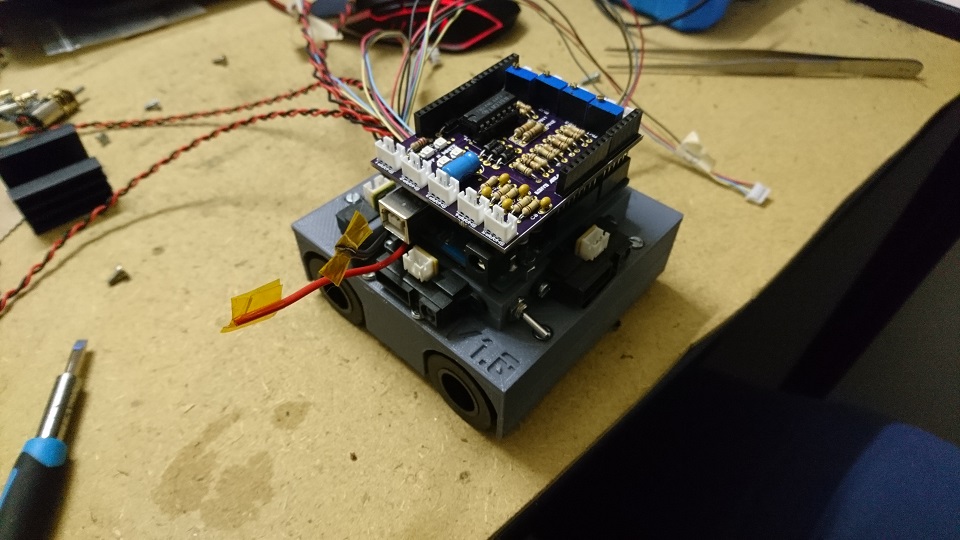
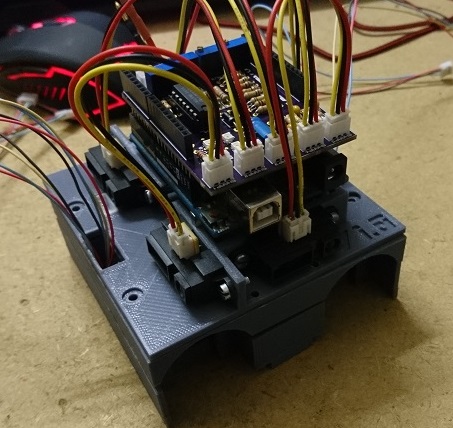
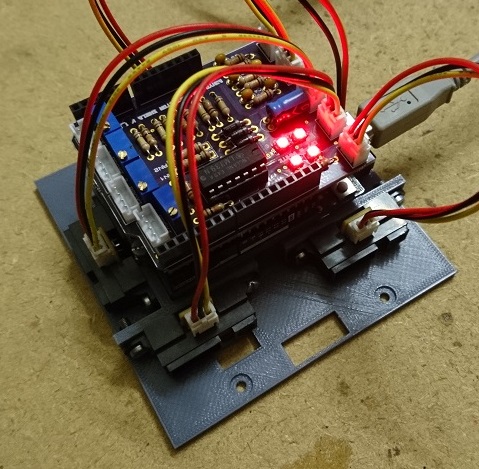
L’électronique reposait sur une carte Arduino UNO, avec deux shields empilés :
l’un dédié à la gestion des capteurs, l’autre au pilotage moteur. L’alimentation était assurée par une batterie LiPo 3S, montée à l’intérieur du robot. Ce choix s’est vite révélé peu pratique, car la batterie était difficile à retirer ou à recharger.
C’est d’ailleurs l’un des premiers enseignements que j’ai tirés : il faut penser la maintenance dès la conception, notamment pour pouvoir démonter ou remplacer la batterie facilement.
Les capteurs et l’autonomie
Raptor devait être entièrement autonome, comme l’exigent les règles du mini sumo.
J’avais donc intégré cinq capteurs de distance Sharp : deux à l’avant, et un sur chaque flanc ainsi qu’à l’arrière. Ils permettaient de détecter la position de l’adversaire et de réagir en conséquence.
Pour éviter les sorties de piste, j’avais ajouté quatre capteurs infrarouges réfléchifs orientés vers le sol, destinés à repérer le bord blanc du dohyo, un capteur dans chaque coin du robot.
Tout cela formait un système simple mais fonctionnel, suffisant pour donner vie à un comportement de base.
Le comportement du robot
L’algorithme était très simple : lorsqu’un capteur détectait un adversaire, le robot avançait dans sa direction ; sinon, il tournait pour tenter de le repérer.
Si un capteur latéral ou arrière détectait quelque chose, Raptor ajustait sa trajectoire ou effectuait un demi-tour.
Pas de stratégie avancée ni d’optimisation à cette époque — mais cela suffisait à me faire entrer dans le monde fascinant des robots autonomes de combat.
Ce que j’ai appris
Avec Raptor, j’ai appris énormément.
J’ai compris l’importance d’une structure basse et rigide, d’un centre de gravité bien placé, et de la facilité d’accès aux composants. J’ai aussi découvert les limites de SketchUp pour la modélisation mécanique, et à quel point le choix des outils influence la qualité du résultat final.
Même si Raptor n’était pas très performant, il a été le point de départ d’une longue série d’expérimentations et d’améliorations.
C’est lui qui m’a donné envie de pousser plus loin la conception, la programmation et la recherche de performance.
En somme, c’est grâce à lui que tout a commencé.

Laisser un commentaire